
For a more complete list of research projects please visit the website of the Artificial Intelligence Laboratory, University of Tsukuba.
eSports and para-eSports
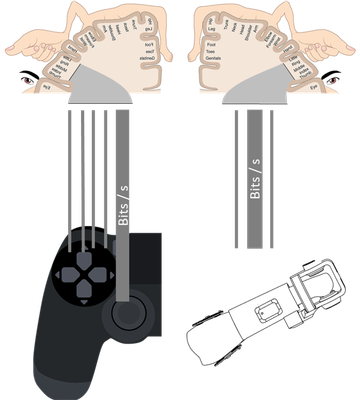
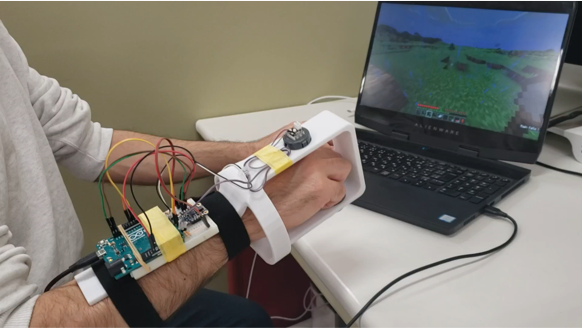

We are investigating the motor and cognitive motor skills in eSports. We are also investigating novel human-computer interfaces and gaming controllers to enable para-esports for persons with finger, hand, or forearm loss.
Robotic Orthoses / Exoskeletons

Robotic Ankle Foot Orthosis with Smart-Fluid based Damper:
We investigate robotic AFOs using a semi-active damper developed at the Artificial Intelligence Laboratory.
This AFO can assist the gait of persons with drop-foot syndrome by mitigating the foot-slap and toe-drag.
The special semi-active damper used in this AFO uses a Smart Fluid called MagnetoRheological Fluid. Thanks to the combination of this smart fluid, a compression spring, and intelligent control, this component can work as a variable camper, a clutch and an energy store-and-release device. Therefore, the robotic AFO can assist the by harvesting kinetic energy during stance, storing it as potential energy in the spring, and use this energy during swing to mitigate toe-drag.
This work is a collaboration with the Flexible Robotic Laboratory of the University of Tsukuba.
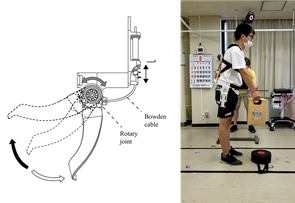
Lumbar Support Semi-Active Exoskeleton:
We use a semi-active damper to develop a lumbar support exoskeleton for factory and healthcare workers. A Bowden cable and CAM mechanism converts the dampers' linear force into assistive torques around the hip joints, and the semi-active nature of the assist elements improve the power and weight properties of the exoskeleton.

Synergy-based Exoskeleton Robot Control:
We are investigating novel methods to control gait support exoskeleton robots based on the understanding of human motor control. One interesting aspect of human (and primate) locomotion is the concept of synergies, where body limbs and segments display cooperative relationships based on common components to achieve the locomotion tasks. By adopting this strategy in robot control, we could be able to control exoskeleton robots in a human-like manner that improves the human-robot interaction, which is critical in the case of wearable robots.
Prosthetics





We investigate a variety of passive and active, partial and full prosthetics. The goal is to broaden the variety of prosthetics that are viable in in various daily life scenarios. We use 3D printing and digital fabrication technologies to accelerate the process of making prosthesis, improve the customization, and reduce the cost to make prosthetics limbs more affordable and accessible.
Brain Computer Interface
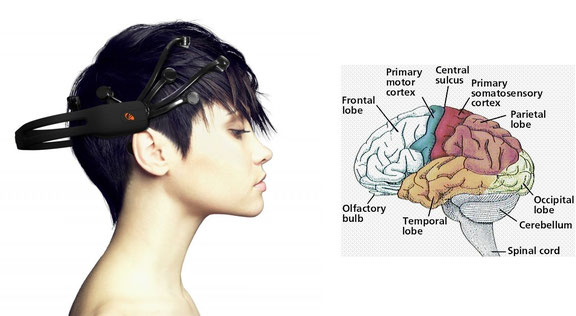
I am interested in understanding how the human brain functions in general, and in specific, how the motor control functions are organized in the brain. Creating a seamless interface between human and computer, based on mere thought, is the merit of this field.
Mechatronics

I studied Mechatronics for quite a few years
Anything with motors and microcontrollers is intriguing for me!
Especially if it is something applicable on the human body!